Geschwindigkeitsprofil erstellen Lokomotiven einmessen/nl: Unterschied zwischen den Versionen
Die Seite wurde neu angelegt: „=== Remcompenstie bepalen met meetrit ===“ |
Die Seite wurde neu angelegt: „'''Let op:''' ''Sinds versie 7.0 d2 is het bepalen van de remcompensatie een afzonderlijk proces en wordt dit niet meer automatisch uitgevoerd na het bepalen van het snelheidsprofiel. Voor het overige gelden de volgende punten nog steeds!''“ |
||
| Zeile 149: | Zeile 149: | ||
=== Remcompenstie bepalen met meetrit === | === Remcompenstie bepalen met meetrit === | ||
'''Let op:''' ''Sinds versie 7.0 d2 is het bepalen van de remcompensatie een afzonderlijk proces en wordt dit niet meer automatisch uitgevoerd na het bepalen van het snelheidsprofiel. Voor het overige gelden de volgende punten nog steeds!'' | |||
''' | |||
<div lang="de" dir="ltr" class="mw-content-ltr"> | <div lang="de" dir="ltr" class="mw-content-ltr"> | ||
Version vom 1. Mai 2025, 15:37 Uhr
| Verwendung |

|
1
Locomotieven kalibreren
Locomotieven kalibreren met TrainController 9 en nieuwer
Er is een apart artikel in de TC-wiki over het kalibreren van locomotieven met TrainController versie 9 of hoger: Locomotief kalibreren
Locomotieven kalibreren met TrainController 7 en 8
De TrainController™ heeft een snelheidsprofiel nodig om locomotieven en treinen realistisch te kunnen besturen, vooral bij het starten en remmen bij gebruik van slechts één detector per blok. Om dit profiel te maken, moet elke locomotief worden "gekalibreerd".
Deze beschrijving heeft betrekking op het uitrusten van het systeem met permanente contacten; de procedure is vergelijkbaar voor het uitrusten met momentcontacten. De hier beschreven locomotiefdecoders kunnen allemaal via CV (Esu Lok Pilot 3 DCC.) worden ingesteld.
Vereisten
- een apart meettraject of
- een geschikt gebied op het systeem met voldoende lange uitloop trajecten
- een locomotief met ingebouwde lastgestuurde digitale decoder (merk maakt niet uit, ik ga uit van lastbesturing, zonder lastbesturing heeft het kalibratieproces geen zin).
- de locomotief moet van tevoren "warm" worden gereden.
- Alle normaal actieve verbruikers van de locomotief - zoals licht of geluid - moeten worden geactiveerd. Mogelijke invloeden van verbruikers worden uitgelegd in het artikel - kalibratie - effect op remgedrag.
Vereisten voor het meettraject
- Lengte van het meetgedeelte (midden): afhankelijk van de spoorbreedte/schaal en de maximumsnelheid van de te meten locomotief voor N vanaf ca. 50cm voor H0 vanaf ca. 100cm. Langere lengtes verhogen de nauwkeurigheid, omdat minimale afwijkingen in de tijdmeting niet zo'n sterk effect hebben op het resultaat.
- Uitlooptraject (bestemming): iets langer dan de langste trein/locomotief die moet worden gemeten.
- Startafstand (start): ten minste lang genoeg voor de trein/locomotief om de volledige meetsnelheid te bereiken.
- Detector: drie opeenvolgende bezetmeldersecties, elk met een eigen detector.
Menu-item oproepen in TrainController
- Bewerkingsmodus instellen.
- Het menu voor het instellen van het snelheidsprofiel kan in TC ofwel via een in machinistencabine opgeroepen locomotief of via het menu Locomotieven + Treinen worden opgeroepen. Klik hiervoor met de rechtermuisknop of "Ctrl+W" om de "Eigenschappen" van de locomotief te openen, of klik op "Eigenschappen" in de menubalk en klik dan op het tabblad "Aandrijving".
Het volgende venster wordt geopend:
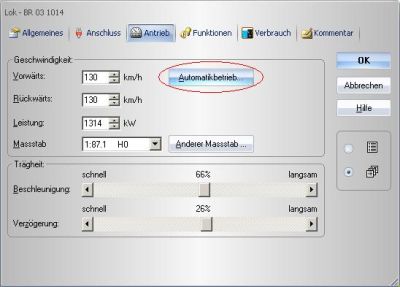
- Fig: Aandrijving

- Snelheid vooruit: Bepaalt de maximumsnelheid waarmee de locomotief vooruit mag rijden op de modelbaan (bovenste rode lijn in het diagram voor de snelheid vooruit).
- Snelheid achteruitrijden: Bepaalt de maximumsnelheid waarmee de locomotief achteruit mag rijden op de modelbaan. (bovenste rode lijn in het diagram voor de achteruitrijsnelheid).
- Vermogen: maximaal vermogen van het origineel.
- Schaal: Zelfverklarend of?
- Vervolgens klikken we op "Automatische modus..."
- Het volgende venster verschijnt:

- Fig: Snelheidsniveaus

- Klik onder "Geavanceerde fijnafstelling" eenmaal in het selectievakje "Gebruiken", dat vervolgens wordt aangevinkt.
- De knop "Geavanceerde fijnafstemming" kan nu ook worden gebruikt.
Een klik op "Geavanceerde fijnafstemming" brengt ons naar het volgende venster.
De kruipsnelheid instellen
- De tekst in het plaatje zegt het eigenlijk al, door met de muis in het groene schuifje te klikken kan de kruipsnelheid worden ingesteld met de muis of met de pijltjestoetsen op het toetsenbord. Zorg ervoor dat de snelheid >0 is. Een zeer gevoelige instelling is mogelijk met "Ctrl" en de pijltjestoets rechts of links. Na het instellen van elke' richting, klik op "Opslaan".

- Fig: Kruipsnelheid

- De weergave in het veld "Stel kruipsnelheid in" komt niet overeen met een waarde in km/h!
Definitie van het meettraject in TrainController

- Fig: Meettraject

- Drop Down veld
- Selectieveld voor het type meting.
- Het derde en vijfde veld, Enkelvoudige meting en Automatische meting met permanente contacten, zijn relevant voor ons.
- Lengte
- Beschrijft de lengte van het eigenlijke meetgedeelte van scheidingspunt tot scheidingspunt van het contactgedeelte gespecificeerd in middelpunt.
- Uitloop
- Lengte van het uitlooptraject ingevoerd in het begin en eindpunt. Deze moet langer zijn dan de te meten trein/locomotief. Als de hier opgegeven waarde te kort is, kan het gebeuren dat het middencontact nog steeds bezet is door de trein/locomotief nadat de meetrit is omgekeerd, wat leidt tot een foutmelding en de meting wordt afgebroken!
- Pauze
- Tijd die wordt gewacht tussen twee meetritten. Belangrijk als er bijvoorbeeld een geheugen is ingesteld in de detectoren.
- Schuifregelaar
- Hier kan een van de snelheidsniveaus worden ingesteld voor individuele metingen.
- Start
- Definieert de detector voor het startpunt van de meetserie. Kan ook de startafstand worden genoemd.
- Midden
- Definieert de detector van het eigenlijke meetgedeelte. De meting start wanneer deze detector is geactiveerd
- Doel
- Definieert de detector voor het eindpunt van de meetrit.
- Verwissel Start<>Doel
- Wisselt de start- en eind detectoren om, bijvoorbeeld om een meting in omgekeerde richting te starten vanaf de vorige bestemming.
- Contactpunt naar achteren
- de lengte vanaf de achterste bufferschijf tot de as van het eerste contact aan de achterkant in cm..

- Remcompensatie achteruit
- Zie "Remcompensatie bepalen met meetrit" voor meer informatie.
- Contactpunt vooruit
- de lengte van de voorste bufferschijf tot de as van het eerste contact aan de voorzijde in cm..
- Remcompensatie vooruit
- Zie "Remcompensatie bepalen met meetrit" voor meer informatie.
- Reset
- Zet de meetresultaten terug naar een standaardwaarde.
De maximumsnelheid bepalen
- De maximumsnelheid van een locomotief kan op verschillende manieren worden bepaald, bijv. met een stopwatch, een snelheidsmeter enz. en natuurlijk met TC.
- Waarom moet de maximumsnelheid worden ingesteld?
- Laten we eens kijken naar de afbeelding rechts.

- In het diagram voor de voorwaartse snelheid zijn er zes zwarte punten tussen de onderste (kruipsnelheid) en de bovenste rode lijn (maximumsnelheid ingesteld in het tabblad "Aandrijving") die door TC zijn bepaald tijdens een meting, alle grijze punten zijn uitgesloten van de meting omdat ze niet kunnen worden bereikt door TC.
- Hoe zorg ik ervoor dat TC alle punten kan meten? Hier komt CV-programmering om de hoek kijken. Zoals je weet is de maximumsnelheid in de decoder opgeslagen in CV5, dus moet ik CV5 verlagen totdat de locomotief de snelheid bereikt die in het tabblad "Aandrijving" is ingesteld op het hoogste snelheidsniveau. Als je goed kijkt, zie je ook dat er twee meetpunten onder de maximumsnelheid uitkomen. Ook hier moet het verhogen van CV2 (minimumsnelheid) ervoor zorgen dat de locomotief soepel en zonder schokken rijdt in de eerste snelheidsstap.
- Hoe bepaal ik de maximale snelheid met TC?

- Plaats de locomotief ongeveer 1-2 meter voor het meettraject aangegeven in "Midden", zorg ervoor dat de detector aangegeven in "Start" eerder afgaat dan de middelste detector.
- Selecteer het derde item van boven in het DropDown veld (enkele meting, afbeelding hieronder).
- Sleep de schuifregelaar helemaal naar rechts.
- Klik op "Starten.
- De locomotief wordt nu versneld tot de maximumsnelheid die is ingesteld in de decoder, rijdt door het meetgedeelte en wordt geremd wanneer hij de einddetector bereikt en tot stilstand komt. Het TC-venster geeft het einde van de meting aan en toont de gemeten snelheid. Klik op OK om de individuele meting te beëindigen.
- Als de maximumsnelheid nog steeds niet binnen de limieten valt, wijzigt u CV 5 opnieuw en controleert u dit met nog een enkele meting.
De automatische meetrit
- Zodra de maximumsnelheid en kruipsnelheid zijn bepaald en ingesteld, kan de eigenlijke meetrit beginnen.
- De locomotief wordt in het gebied geplaatst dat is opgegeven onder "Start" zodat de startdetector wordt geactiveerd.
- Het vijfde item van boven wordt geselecteerd in het vervolgkeuzemenu "Automatisch meten van het volledige snelheidsprofiel met doorlopende contacten".
- Onder "Contactpunt" voor vooruit en achteruit wordt de bepaalde waarde in cm weergegeven.
- Klik op Start en de meting begint.
- Tijdens de eerste meetrit rijdt de locomotief nu de meetsectie binnen met de ingestelde kruipsnelheid, rijdt door de sectie en wordt gestopt na het bereiken van de doeldetector en de ingestelde uitloop. Na het verstrijken van de ingestelde pauze keert de locomotief en rijdt achteruit door het meetgedeelte.
- Het hele proces wordt nu maximaal veertien keer herhaald, waarbij de snelheid bij elke nieuwe passage wordt verhoogd.
- Als de meting wordt afgebroken met een foutmelding, komt dit meestal doordat de uitloop te kort is ingesteld.
- Opmerking: De middendetector moet uitgeschakeld zijn voor elke verandering van richting!

- Fig: Meetrit

Remcompenstie bepalen met meetrit
Let op: Sinds versie 7.0 d2 is het bepalen van de remcompensatie een afzonderlijk proces en wordt dit niet meer automatisch uitgevoerd na het bepalen van het snelheidsprofiel. Voor het overige gelden de volgende punten nog steeds!
- Auch hierzu bietet TC ein Instrument an, welches im DropDown Menü an letzter Stelle zu finden ist.
- Um diese Messung durchzuführen sollte die Lok wie bei einer Einzel Messfahrt aufgestellt werden.
- Der Regler für die Geschwindigkeit wird ganz nach rechts geschoben und auf Start geklickt.
- Die Lok fährt jetzt mit Anlauf in die Messstrecke ein und wird von TC allmählich abgebremst, Idealerweise sollte die Lok jetzt genau mit der ersten Kontakt auslösenden Achse auf der Trennstelle zwischen "Mitte" und "Ziel" stehenbleiben.
- Lok fährt zu weit: mehr Bremsausgleich einstellen.
- Lok kommt vor der Trennstelle zum stehen: weniger Bremsausgleich einstellen.
- Werden alle diese Punkte durchgeführt, wird man sich über eine Lok freuen können die wirklich auf den Zentimeter hält wo sie soll.
Weblinks
- Quelle: Forum
- TC-wiki: Decoder Geschwindigkeitsprofil
- TC-wiki: Lokomotive einmessen
- -- E.Menke 14:31, 12. Feb. 2009 (UTC)
- bearbeitet: Digi thomas2003 20:41, 12. Mär. 2014, UP4001 19:17, 20. Okt. 2014, Uslex (Diskussion) 10:05, 20. Jul. 2022 (CEST), Uslex (Diskussion) 14:35, 30. Sep. 2023 (UTC)
